Pengembangan Robot Darat, Robot Udara, Robot Bawah Laut dan Kerjasama antar Robot
Product information
By Bambang Riyanto Trilaksono & Tim Riset Advanced RoboticsThis research develops autonomous ground vehicle (unmanned ground vehicle) and aerial robot (unmanned aerial vehicle) and their cooperation aims to find sources of hazardous gases or map an area contaminated with dangerous gases. More specifically, research and development is carried out as follows:
- searching for gas sources with single or multiple mobile ground robots with the capability of simultaneously mapping the environment and positioning as well as the ability to avoid obstacles,
- mapping of two-dimensional distribution of hazardous gases automatically with aerial robots,
- search for sources of hazardous gases with aerial robots,
- mapping of two or three-dimensional gas distribution with the cooperation of ground robots and aerial robots.
In research related to the cooperation of several robots, cooperation between moving robots and cooperation between humanoid robots that can move with distributed control are developed to form formations and avoid obstacles.
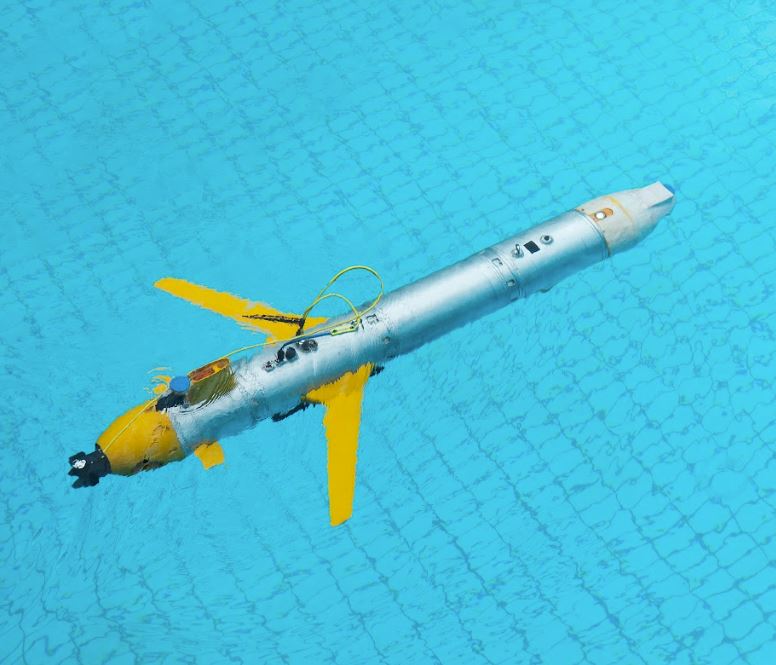
In related research, the design and development of underwater autonomous robots is also carried out. There are two types of underwater robots being developed:
- autonomous underwater glider have a mission of measuring temperature and salinity of the sea column which is controlled and monitored through a ground control station,
- hybrid autonomous underwater vehicle with the ability to glide and maneuver under the sea which is intended to perform bathymetry and surveillance missions with obstacle avoidance capabilities.